产品开箱效果图(AMBER B1)

硬件需求与连接
硬件需求
从左至右,从前至后依次为:树莓派、树莓派电源线、网线、急停开关+电源线、机械臂。

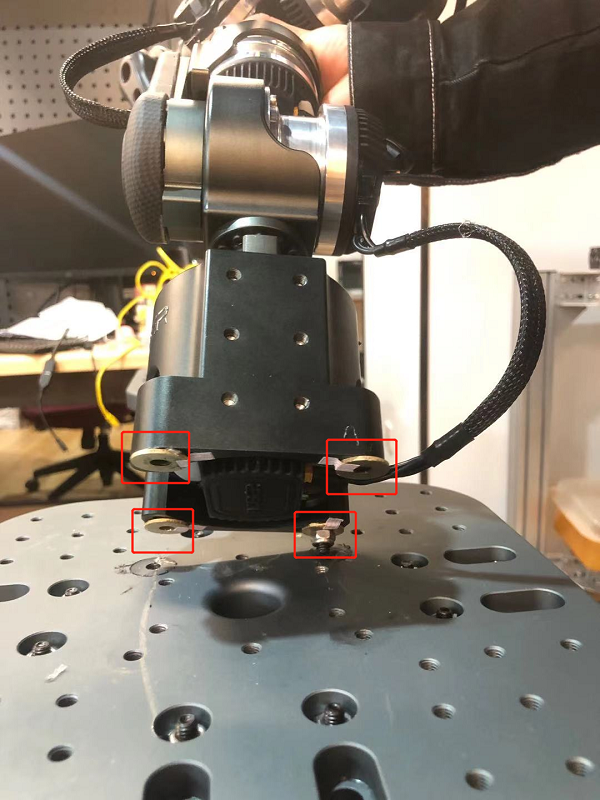
开始之前,机械臂必须固定在刚性结构上。
机械臂固定在刚性结构上需要加4个垫片,否则会损坏驱动板,如下示意图。
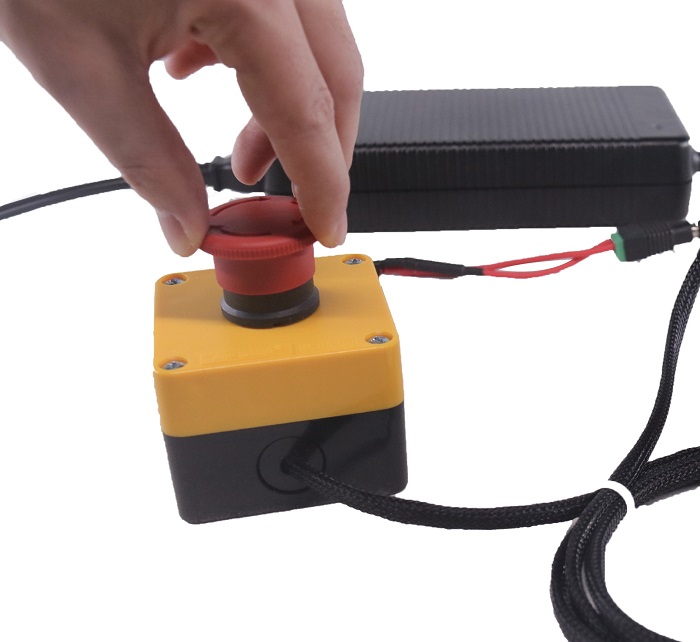
①连接电源
- 机械臂与电源线连接

- 树莓派连接电源

②连接网线
- 机械臂与树莓派通过网线连接

树莓派连接无线网络
- 给树莓派外接显示器、鼠标、键盘之后,在显示器界面接入无线网络
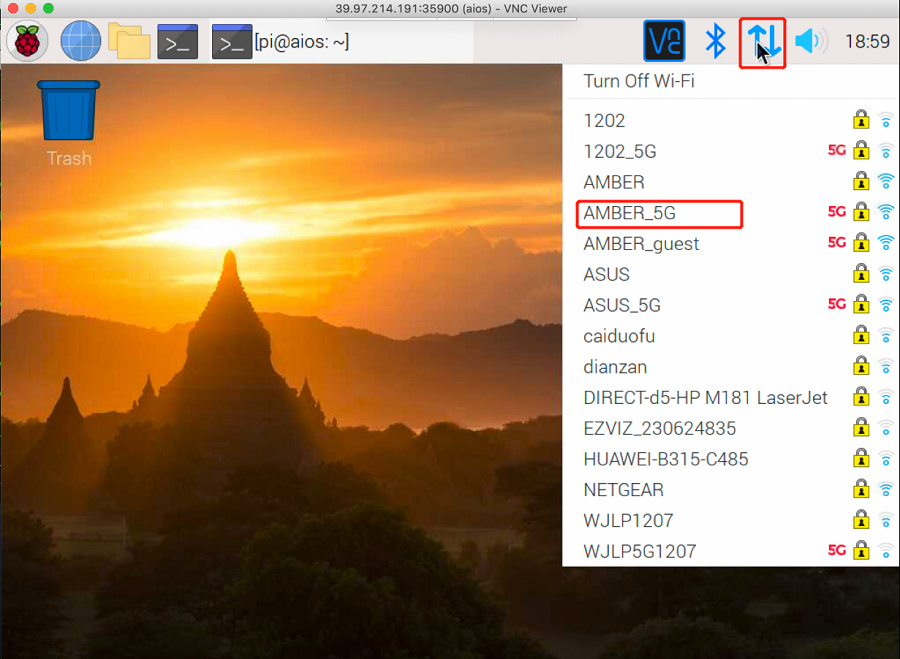
树莓派无线网卡wlan0是动态IP。树莓派有线网卡eth0是固定IP,IP地址为10.0.0.1 子网掩码 255.255.255.0
机械臂各关节均为固定IP,IP地址按照1轴至7轴分别为10.0.0.10至10.0.0.16
开启电源
启动电源或断电重新开启机械臂之前,都需要先让机械臂归零位。
机械臂归零位示意图:限位①跟限位②必须相对


- 开启电源,执行器的供电电压范围为直流24V-48V。
上电以后,执行器LED灯会闪烁紫光,若不是紫光,则机械臂异常,请重启机械臂或者联系我们
软件操控
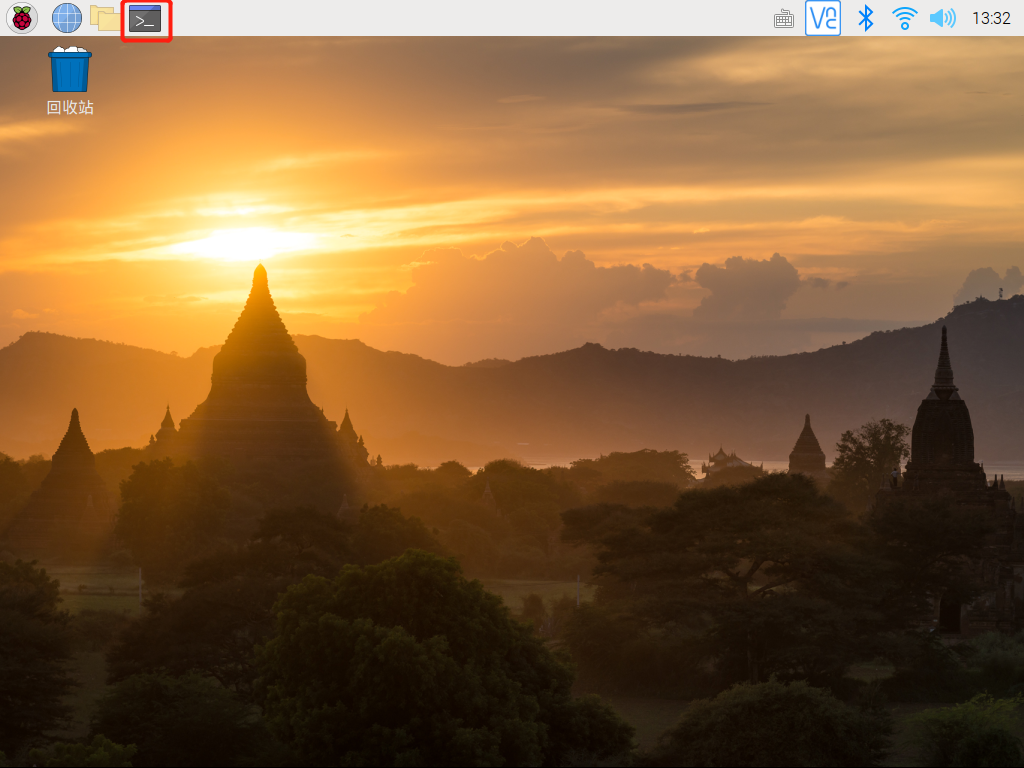
进入树莓派系统
- 在显示器界面进入树莓派系统
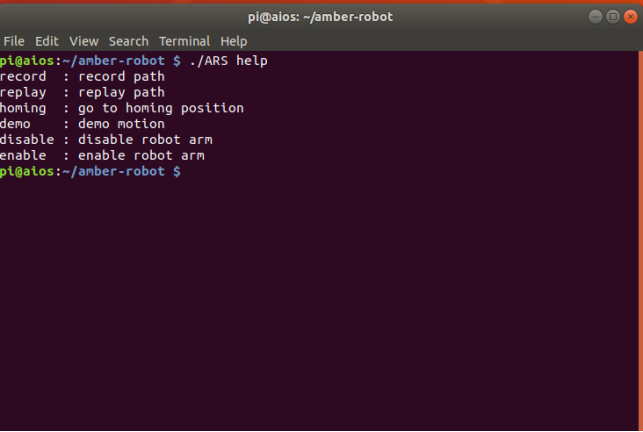
- ARS提供6种操作模式,可通过./ARS help 查看指令
cd amber-robot
./ARS help
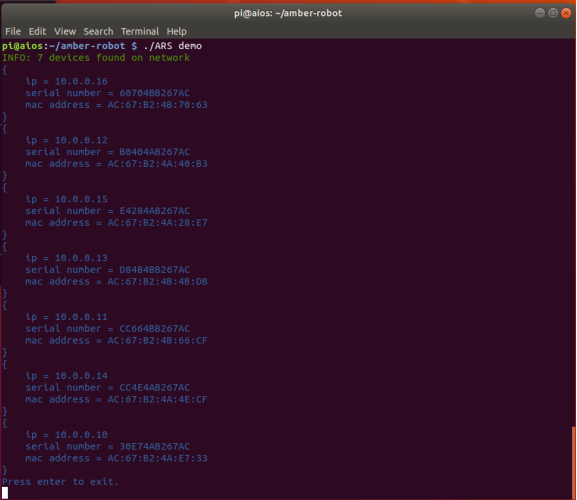
- 运行一个示例动作,运行期间可按enter键停止运动
./ARS demo
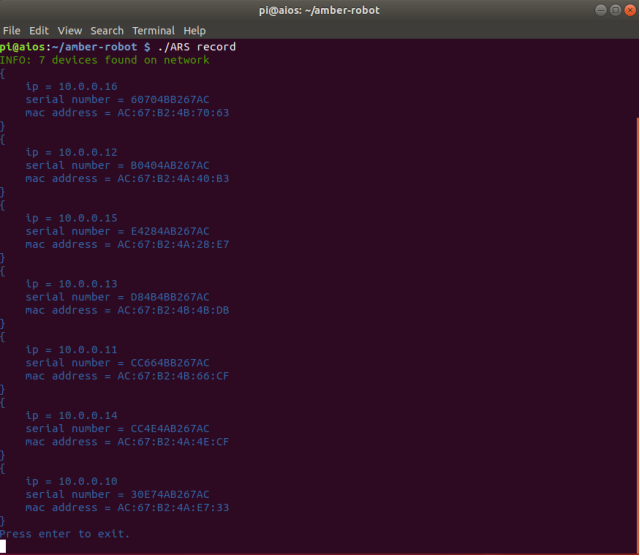
- 录制机械臂动作,按enter键停止录制,而后可使用 replay 模式播放动作
录制前请用手扶着机械臂,否则机械臂将因为重力而下落
./ARS record
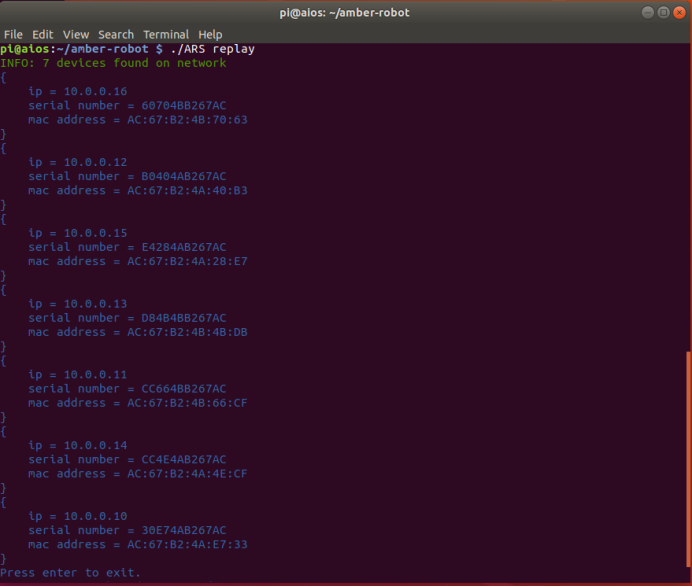
播放动作,动作来源为record 模式录制的动作 ,按enter键停止播放
./ARS replay
- 使机械臂回原点,运行期间可按enter键停止运动
./ARS homing
- 失能机械臂,机械臂将处于无力状态而人手可轻易拖动
./ARS disable
执行前请用手扶着机械臂,否则机械臂将因为重力而下落
- 使能机械臂,机械臂将处于位置模式而人手难以拖动
./ARS enable
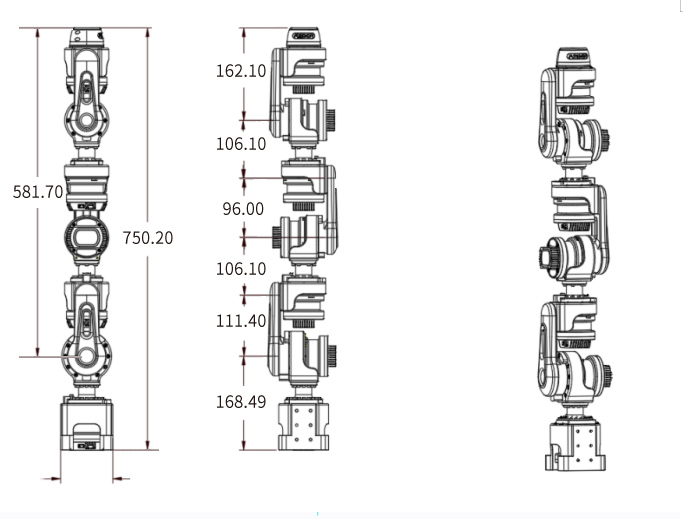
技术参数
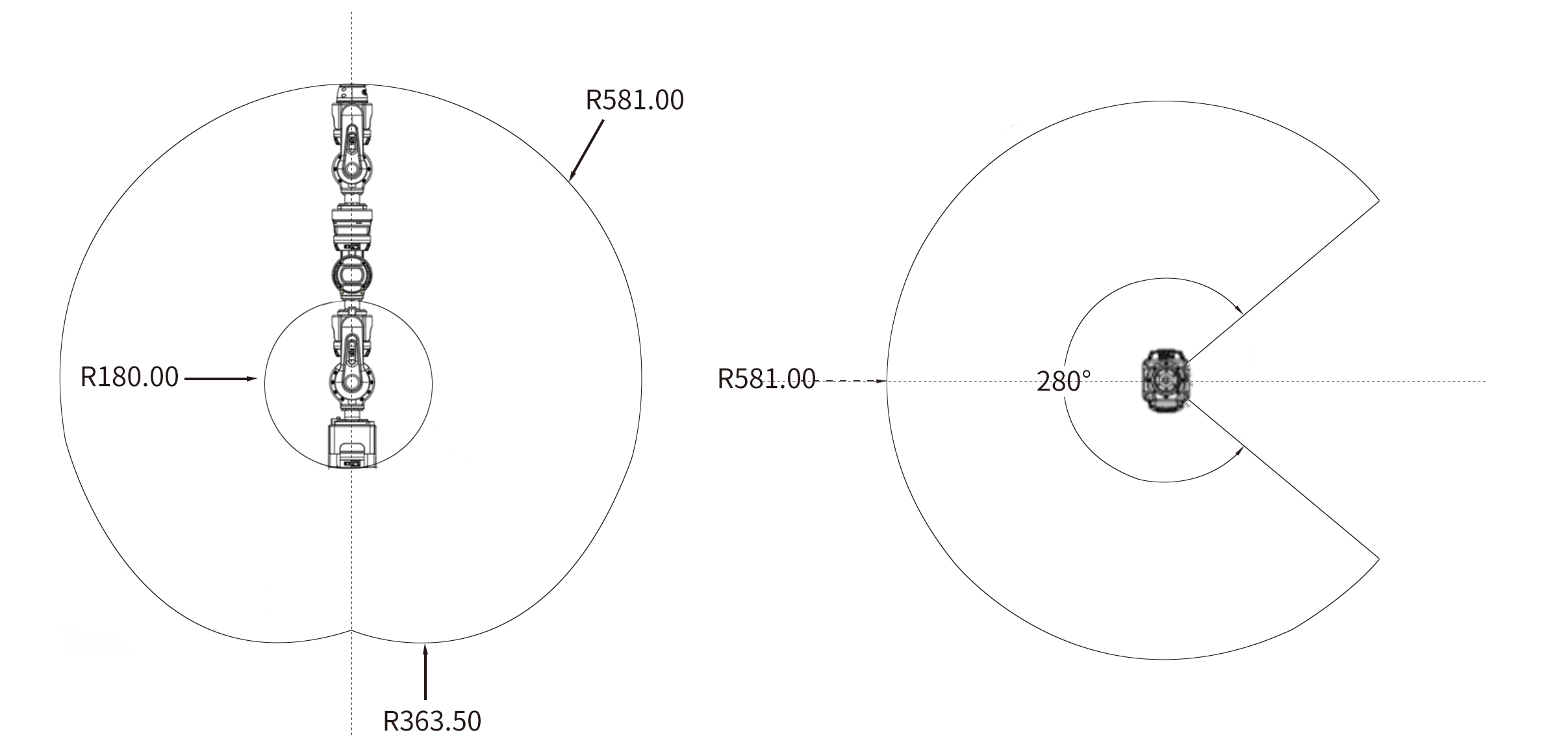
工作空间 (单位:毫米)
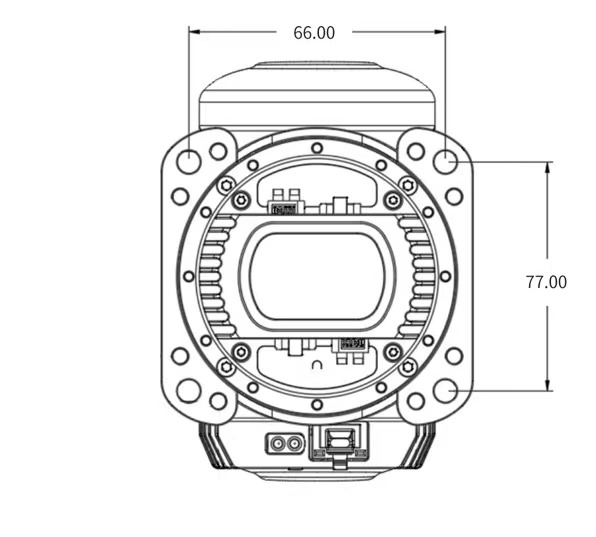
底座固定螺丝尺寸(单位:毫米)
末端加装工装螺丝尺寸(单位:毫米)

本体参数
| 型号 | Bionic-1 |
|---|---|
| 总长度 | 750mm |
| 工作半径 | 581mm |
| 额定/最大负载 | 3kg |
| 轴数 | 7 |
| 安装方式 | 地面,悬挂,倾斜 |
| 重复定位精度 | ± 0.05mm |
| 工作环境温度 | +0 ~ +40° |
| 储存温度 | -25° ~ +55° |
| 工作/储存环境湿度 | 不大于95%,无凝雾 |
| 本体质量 | 7.8Kg |
| 驱动方式 | 无刷伺服驱动 |
| 通信协议 | Ethernet |
轴参数
| 正 | 负 | 轴最大速度 | 减速比 | |
|---|---|---|---|---|
| 一轴限位角度 | 140 | -140 | 180°/s | 50 |
| 二轴限位角度 | 133 | -133 | 180°/s | 50 |
| 三轴限位角度 | 131 | -131 | 180°/s | 50 |
| 四轴限位角度 | 131 | -131 | 180°/s | 50 |
| 五轴限位角度 | 131 | -131 | 300°/s | 30 |
| 六轴限位角度 | 131 | -131 | 300°/s | 30 |
| 七轴限位角度 | 175 | -175 | 300°/s | 30 |